|
| enum | { FD_SECTOR_PER_TRACK = 18,
FD_HEAD = 2,
FD_BLKSZ = 512
} |
| | 트랙, 헤드, 블럭크기를 정의한다. 더 자세히 ...
|
| |
| enum | base_address { FDC_PRIMARY = 0x3F0,
FDC_SECONDARY = 0x370,
FDC_BASE_MAX = 0xFFFF
} |
| | 플로피 디스크 드라이버 Primary,Secondary 포트 주소 정의 더 자세히 ...
|
| |
| enum | bytes_per_sector { SECTOR_128 = 0,
SECTOR_256 = 1,
SECTOR_512 = 2,
SECTOR_1024 = 3
} |
| | 섹터당 바이트 수를 정의한다 더 자세히 ...
|
| |
| enum | drive_activation_values { DRIVE0 = 0x1C,
DRIVE1 = 0x2D,
DRIVE2 = 0x4E,
DRIVE3 = 0x8F
} |
| |
| enum | dma_state { DMA = 0x01,
NONDMA = 0x00
} |
| |
| enum | precompensation_delays {
DELAY_DISABLED = 0x07,
DELAY_41_67ns = 0x01,
DELAY_83_34ns = 0x02,
DELAY_125ns = 0x03,
DELAY_166_67ns = 0x04,
DELAY_208_33ns = 0x05,
DELAY_250ns = 0x06,
DELAY_DEFAULT = 0x0
} |
| |
| enum | data_rates { DRATE_1Mbps = 0x03,
DRATE_500Kbps = 0x00,
DRATE_300Kbps = 0x01,
DRATE_250Kbps = 0x02
} |
| |
| enum | drive_letter {
DRIVE_A = 0x00,
DRIVE_B = 0x01,
DRIVE_C = 0x02,
DRIVE_D = 0x03,
DRIVE_MAX = 0xFF
} |
| |
| enum | dir_of_data { UNDEFINED = 0x00,
READ_REQUIRED = 0x01,
WRITE_REQUIRED = 0x02,
MAX_DIR_OF_DATA = 0xFF
} |
| |
| enum | fdc_dma_dir_t { FDC_DMA_READ = 1,
FDC_DMA_WRITE = 2
} |
| |
| enum | command_set {
CMD_READ_DATA = 0x06,
CMD_READ_DELETED_DATA = 0x0C,
CMD_WRITE_DATA = 0x05,
CMD_WRITE_DELETED_DATA = 0x09,
CMD_READ_TRACK = 0x02,
CMD_VERIFY = 0x16,
CMD_VERSION = 0x10,
CMD_FORMAT_TRACK = 0x0D,
CMD_SCAN_EQUAL = 0x11,
CMD_SCAN_LOW_OR_EQUAL = 0x19,
CMD_SCAN_HIGH_OR_EQUAL = 0x1D,
CMD_RECALIBRATE = 0x07,
CMD_SENSE_INTERRUPT = 0x08,
CMD_SPECIFY = 0x03,
CMD_SEND_DRIVE_STATUS = 0x04,
CMD_SEEK = 0x0F,
CMD_CONFIGURE = 0x13,
CMD_RELATIVE_SEEK = 0x8F,
CMD_DUMPREG = 0x0E,
CMD_READ_ID = 0x0A,
CMD_PERPENDICULAR_MODE = 0x12,
CMD_LOCK = 0x14,
CMD_EXT_MULTITRACK = 0x80,
CMD_EXT_DENSITY = 0x40,
CMD_EXT_SKIP = 0x20
} |
| |
| enum | symbol { EIS = 0x06,
EFIFO = 0x05,
POLL = 0x04
} |
| |
플로피 디스크 드라이버를 구현한다.
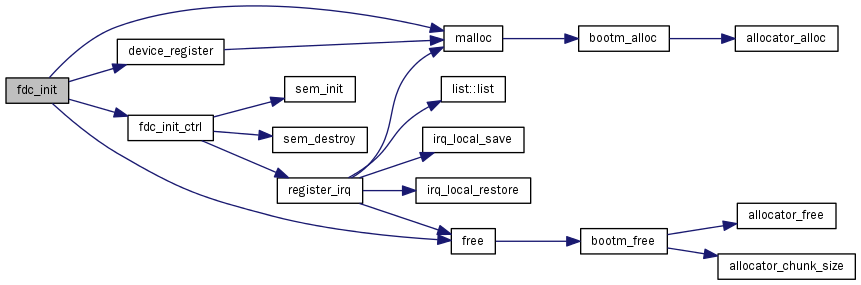
 Floppy Drive Controller에 대한 협력 다이어그램:
Floppy Drive Controller에 대한 협력 다이어그램: